Citerus anordnade i tisdags (3/5) ett event i Stockholm där uppdraget var att programmera en ormhjärna. Din ormhjärna skulle sedan tävla mot andra ormar som andra lag programmerat.
Jag, Oskar Wirén och Jim Sagevid var ett lag, vi hade inte tittat så mycket på API:t innan så vi hade ganska dålig koll på det. Tävlingen gick ganska dåligt för oss, vi slarvade alldeles för mycket och vi blev väldigt stressade. Istället så fick vi ihop en fungerande version på vägen hem på tåget på ca. 4-5 minuter…
Det lutar åt att några av de andra lagen hade lite förberett kod, då det var ganska stressigt med tid att få klar en första prototyp (~1h), eller så var de helt enkelt grymt snabba! Hade vi haft lite framförhållning så hade det nog varit en ganska smart idé, men det är alltid lätt att vara efterklok. Det var i alla fall en väldigt trevlig kväll och ett riktigt kul arrangemang!
Demonstration
Här kör vi mot ett annat lag som också kommer ifrån Uppsala, vi heter “Team Borm” (den kör v2) och de är “Sneaky Brian”. Vi märker tydligt att det är en del problem när båda två är väldigt nära samma frukt.
Jag tänkte dela med mig av en karusell i jQuery, eller kanske en “infinite slider” som det så fint heter. Jag utgick ifrån en väldigt enkel slider som jag hittade, de allra flesta “färdiga” jag hittade var alldeles för stora, klumpiga och bloatade.
Krav:
Pilar för att navigera höger och vänster
En manuell navigering för att hoppa till valfri “slide”
Läs först igenom jQuery Infinite Carousel och se till att du är med på grundkonceptet, alltså hur den visar respektive slide. Det jag lagt till är att du placerar pilarna i lista som detta:
Jag försökte hålla det så enkelt som möjligt, samt att jag ville ha en “ren” version som jag själv kan gå tillbaka till och återanvända i andra projekt. Har ni förslag på förbättringar så tar jag gärna emot dem!
Uppdaterad 2011-03-31 med källkod och lite mer information
Vi har under de senaste 7 veckorna arbetat med ett projekt i en kurs som heter “Distribuerade system med projekt”. Vår projektbeskrivning var i korta drag detta:
“You are to design and implement a complete software system that provides Internet access to semi-autonomous soft-realtime robot.”
Då hälsar vi WALL-E välkommen!
WALL-E med orginalet
Introduktion
WALL-E är konstruerad i Lego, den är ifrån Lego Mindstorms NXJ och omflashad med LeJOS för att vi ska kunna köra Java på den.
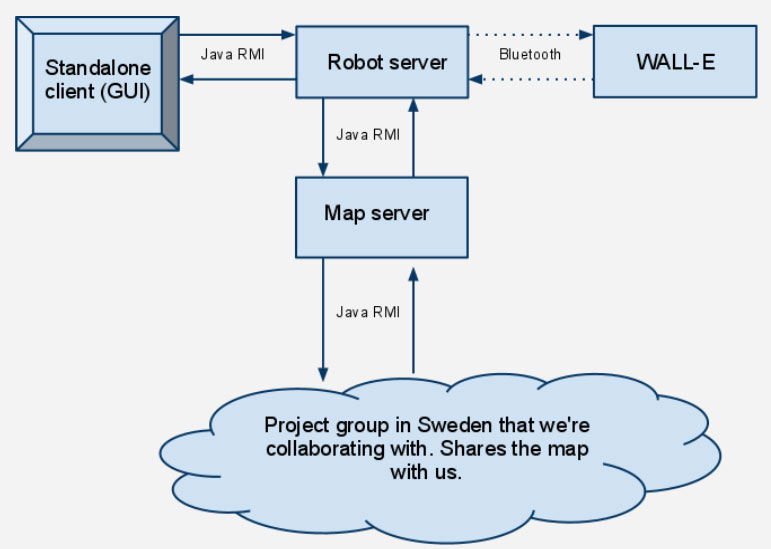
Vårt projekt krävde att vi skulle kunna styra roboten från vilken klient som helst, därför valde vi att köra Java RMI mellan våra olika system.
System diagram
Klienten
Windowsklienten
Klienten är skriven som en Java-applet och kan därför köras ifrån alla möjliga operativsystem, de vi har testat är Linux, Mac OS X samt Windows 7. Den ansluter till ett externt ip som “robotservern” körs på.
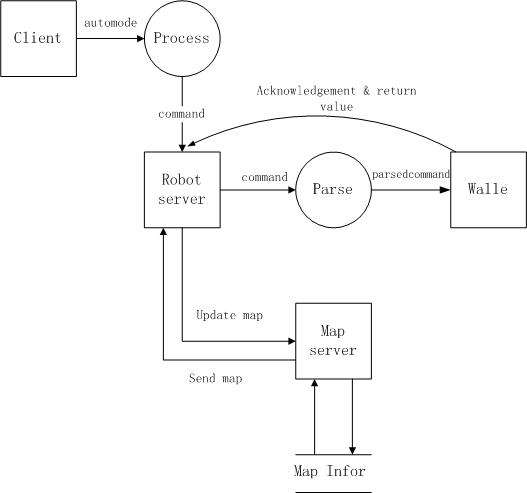
Dataflöde – Manuellt läge
Ovan ser ni även hur flödet ser ut när vi skickar enskilda kommandon ifrån det manuella läget i klienten.
Autopiloten
I projektet ingick även att vi ska samarbeta med en annan robot i Sverige och söka av ett rum. Vi satte därför upp ytterligare en service som sköter kartan, den körs via RMI och använder sig av en MySQL-databas som robotarna sedan kommunicerar med via interfaces. Kartan genereras sedan med hjälp av GD och PHP och skickas sedan till klienten.
Denna del är den som tagit överlägset längst tid, vår autopilot gör väldigt komplicerade beslut på egen hand. Bra jobbat Julius, Erik och Henrik!
Dataflöde – Autopilot
När roboten körs i autopilot-läget så gör den inga beslut själv, alla beslut sker genom robotservern och den i sin tur kontrollerar hela tiden med kartservern vilka ytor som är lediga/upptagna.
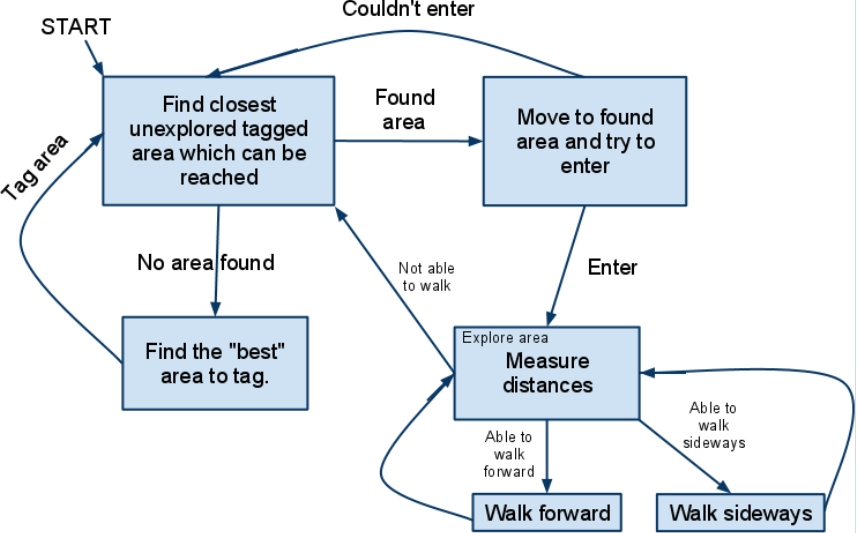
Kartläggningsalgoritm
Allting baseras på en “tile map” för att förenkla algoritmen.
Den använder en egenkomponerad Dijkstra-algoritm med viktbaserad beslutshantering för all kartläggning.
Den använder även ett poängsystem för att bestämma vilken del av kartan den ska besöka härnäst.
Varje gång den kollar något så kollar den detta tre gånger, med små vinkelskiftningar, för att förbättra avläsningen.
Demonstration
Detta är en 40 sekunder lång demonstration, där WALL-E har kört igenom en hinderbana och håller på att slutföra kartan. Håll koll på den övre högra delen på kartan på laptopen där den monterar ut väggarna allt eftersom den flyttar på sig (jag ber om ursäkt att ljudet hackar i videon).
Tyvärr verkar den ha tappat all commit-historik när jag flyttade över det, det var lite trist. För en fullständig historik av commitsen så har jag en lokal kopia lagrad med all information.
Så här i efterhand så är vi väl inte särskilt nöjda med kodresultatet, vi hade nog gjort om det mesta på ett “bättre” sätt.